强化学习的基本环境和流程
《Reinforcement learning, An Introduction》学习系列笔记。
强化学习中的MDP是Agent和Environment交互的过程,如下图所示:
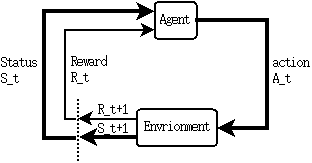
假设Agent的初始状态为,Agent根据自身的策略(随机或者某种特定的策略)采取了动作,Envrionment根据此动作给出了Agent的下一状态和相应的Reward:,Agent再根据决定采取动作,于是形成了如下的序列:
也就是说,<S,A,R>三元组构成了MDP的主要过程。
dynamics funtion
dynamics function是MDP问题的一个基础函数:
并且:
dynamics function是一个四元概率函数,是对Environment的建模,即将Agent看做一个白盒(合理的假设,因为Agent对我们而言是完全可控的),则Agent的输入s和输出a对于Environment而言可以看做是Environment的输入,因此dynamics function的意义为:给定状态s和动作a,Environment输出下一时刻的状态s’及其相应的reward r的概率。
在MDP中,状态转移矩阵是一个重要的概念。有了dynamics function,状态转移矩阵可以表示为(传统的状态转移矩阵为,这里加入了a):
对于reward的期望,即给定a,s时随机变量的期望表示为:
上式也可以表示为:
也就是说,把r放到里面结果是一样的。但是,第一种表示方法更加直观的表达出了期望的计算方式。
则是一个表示即时奖励的标量函数,即Agent根据当前状态s做出动作a之后,环境在反馈一个s’的同时,也会反馈一个相应的reward。
对于三元组<s,a,s’>的reward期望,可以表示为:
由条件概率的定义可得:
于是:
画个图可以更直观的理解r(s,a,s’)的计算方法:
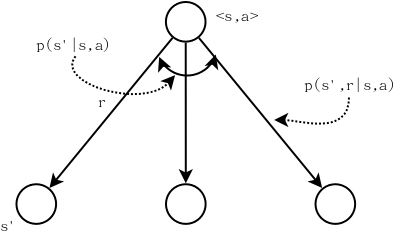
| 从图中可以看出$$\sum\frac{p(s’,r | s,a)}{p(s’ | s,a)} = 1$$。 |
案例分析
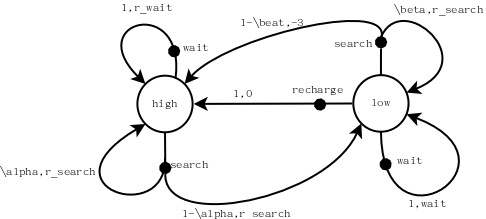
假设办公室有一个可充电的罐罐收集机器人,负责收集办公室的空的瓶瓶罐罐。这个机器人的充电状态为S{high, low},在电池电量为high时,机器人的动作空间为A{high}={search,wait},search表示四处游走寻找瓶瓶罐罐一个固定的时间(不会耗光电量),其reward为;wait表示原地等待有人送来一个罐罐,其reward为,此时也不会耗光电量。显然,电池电量为high时去充电是愚蠢的行为,因此当电池电量为high时,其动作空间不包括recharge这个动作。当充电状态为low时,机器人的动作空间为A{low}={search, wait, recharge},其中search、wait的含义等同与电池电量高时的清醒,recharge的reward为0。但是,此时如果 执行search动作,可能会导致机器人耗光电量,机器人只能原地等待救援,我们假设其reward为-3。
假设电池电量高时research完成后电量仍然高的概率为,电池电量低时research动作完成后电量依然低的概率为,于是本案例可表示为下图,其中无背景圆圈表示机器人的电池电量状态空间,黑色圆点表示机器人的动作空间。弧线上标注的是动作的概率及其reward值。可以看出,每一个动作的总的概率和为1。这是一个Agent视角的状态图。
通过概率转移矩阵的方式描述本案例:
| s | a | s’ | |||
|---|---|---|---|---|---|
| high | search | high | |||
| high | search | low | |||
| high | wait | high | 1 | 1 | |
| high | wait | low | – | 0 | 0 |
| low | search | high | -3 | ||
| low | search | low | |||
| low | wait | high | – | 0 | 0 |
| low | wait | low | 1 | 1 | |
| low | recharge | high | 0 | 1 | 1 |
| low | recharge | low | – | 0 | 0 |
上表中,,但是由于<s,a,s’,r>是一一对应关系,因此
本案例重点是要学到使用MDP进行分析的基本步骤:
- 辨识Agent和Enviroment。
- 辨识Agent的状态空间
- 根据状态空间确定Agent的动作空间
-
测量状态转移函数p(s’ s,a)或者p(s’,r s,a)
